| HomeTurtlegrafikGPanelRobotikGameGrid WebTigerPython |
| Python - Online |
| Deutsch English |
2. ROBOTER BEWEGEN
![]()
DU LERNST HIER... |
|
MUSTERBEISPIELE |
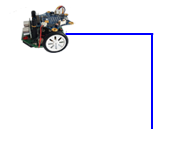
| Beispiel 1: Fahren und abbiegen Der Roboter soll zuerst vorwärts fahren, dann links abbiegen und danach wieder ein kurzes Stück vorwärts fahren.
Programm: from callibot import * #from callimk import * forward() delay(2000) left() delay(550) forward() delay(2000) stop() Die Befehle für den Callibot und den CalliMk sind genau gleich. Da die Hardware nicht identisch ist, braucht es zwei verschiedene Bibliotheken. Falls du mit dem CalliMk arbeitest, musst du in allen nachfolgenden Beispielen die Import Zeile ändern: Der Drehwinkel, welchen der Roboter in 550 Millisekunden zurücklegt ist von der Unterlage und insbesondere auch vom Ladezustand der Batterien abhängig. Wenn sich der Roboter zu lansam bewegt und nur um einen kleinen Winkel dreht, muss du die Batterien wechseln. Teste das Programm auch im Simulationsmodus. Hier dreht der Roboter imme genau um 90°. |
Programm: from callibot import * forward() delay(4000) backward() setLED(1) delay(3000) setLED(0) delay(1000) stop() |

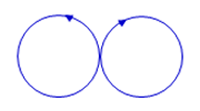
Programm: from callibot import * setSpeed(30) leftArc(0.2) delay(5000) rightArc(0.2) delay(5000) stop() |

MERKE DIR... |
Für die Steuerung des Roboters stehen die folgende Befehle zur Verfügung:
Bei der Roboterprogrammierung musst du in Zuständen denken. Der Befehl forward() versetzt den Roboter in eine Vorwärtsbewegung. Während die Motoren in diesem Zustand sind, kann der Microprozessor Befehle an andere Aktoren erteilen. Ein laufendes Programm kannst du jeder Zeit abbrechen, indem du die Stromversorgung mit dem blauen Button hinten auf dem Roboterchassis ausschaltest. |
ZUM SELBST LÖSEN |
|
ZUSATZSTOFF: MOTOREN UND LEDs EINZELN STEUERN |
Die Befehle forward(), left() usw. steuern das ganze Fahrwerk, das aus zwei synchronisierten Motoren besteht. Man kann aber auch die einzelnen Motoren einschalten und ihre Geschwindigkeit regeln. Dazu must du für Callibot die Bibliothek callibotmot importieren. Mit motL.rotate(speed) wird der linke Motor in die Vorwärtsbewegung versetzt und rotiert mit der Geschwindigkeit speed. Für die positiven speed-Werte rotiert der Motor vorwärts, bei negativer Werten rückwärts und für speed = 0 hält der Motor an. Entsprechend funktioniert der Befehl motR.rotate(speed) für den rechten Motor. Beim CaliMk wird mit motorL(dir, speed) für dir = 0 der linke Motor in die Vorwärtsbewegung versetzt und rotiert mit der Geschwindigkeit speed. Für dir = 1 rotiert der linke Motor rückwärts und mit motorL(0, 0) hält er an. Entsprechend funktioniert der Befehl motorR(dir, speed) für den rechten Motor. |
Beispiel 5: Leds einzeln ein - und ausschalten Mit den Befehlen setLED(1) und setLED(0) kannst du beide LEDs gleichzeitig ein- und ausschalten. Du kannst die LEDs auch einzeln ansprechen: setLEDLeft(1) schaltet die linke LED ein setLEDLeft(0) schaltet die linke LED aus setLEDRight(1) schaltet die rechte LED ein setLEDRight(0) schaltet die rechte LED aus
Programm: from callibot import * setLEDLeft(1) delay(2000) setLEDLeft(0) setLEDRight(1) delay(2000) setLEDRight(0) |
ZUM SELBST LÖSEN |
|
![]()