| HomeTurtlegrafikGPanelRobotikGameGrid WebTigerPython |
| Python - Online |
| Deutsch English |
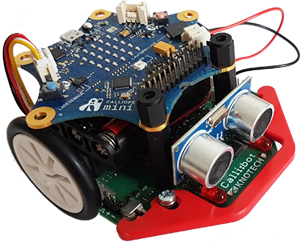
8. TOUCHSENSOREN (nur Callibot)
![]()
DU LERNST HIER... |
wie du Touchsensoren dafür einsetzen kannst, Hindernisse zu erkennen und entsprechend zu reagieren. |
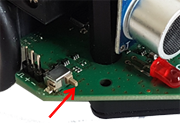
WIE FUNKTIONIERT EIN TOUCHSENSOR |
|
|
https://www.tinkercad.com/things/0bfM0UhJQOk (Stossstange) |
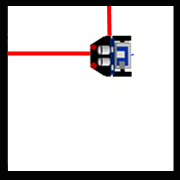
MUSTERBEISPIELE |
Programm: from callibot import * forward() repeat: ts = tsValue() if ts == 1: backward() delay(1500) left() delay(550) forward() delay(100)
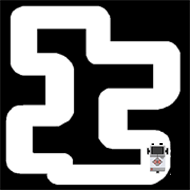
Programm: from callibot import * setSpeed(30) forward() repeat: tsL = tsLeftValue() tsR = tsRightValue() if tsL == 1: backward() delay(250) right() delay(200) forward() elif tsR == 1: backward() delay(250) left() delay(200) forward() delay(100) |
MERKE DIR... |
Die Touchsensoren können nur zwei Werte zurückgeben und zwar 1, falls der Sensor gedrückt wurde, sonst 0. Zum Abfragen der Sensorwerte stehen dir drei Befehle zur Verfügung:
|
ZUM SELBST LÖSEN |
|

|
![]()